


































W zegarach i zegarkach dla wykonania podstawowego postawionego przed nimi zadania - pomiaru i wskazywania czasu, stosuje się klasyczne zespoły: naciąg, napęd, przekładnię chodu, przekładnię wskazań, wychwyt i regulator chodu. Prócz nich dla poprawienia dokładności chodu, ułatwienia obsługi, korekty nastaw i poprawnego działania dodatkowych zespołów funkcjonalnych, stosuje się wiele specyficznych konstrukcji mechanicznych.
Do grona takich bardzo ciekawych rozwiązań należy na pewno zaliczyć mechanizmy różnicowe (sumujące). Nazwanie mechanizmu różnicowym, lub sumującym jest zależne od analizy drogi przepływu energii i kierunku ruchu w rozważanym rozwiązaniu.
Mechanizm różnicowy składa się zwykle z trzech członów tak powiązanych kinematycznie że ruch jednego z członów wpływa na stan pozostałych. Człon środkowy zwykle zwany jest „jarzmem” (w niniejszych rozważaniach oznaczony literą: „J”).
1. Mechanizm różnicowy (sumujący) dźwigniowy
Najprostszym mechanizmem różnicowym (sumującym) jest mechanizm zbudowany na bazie dźwigni.
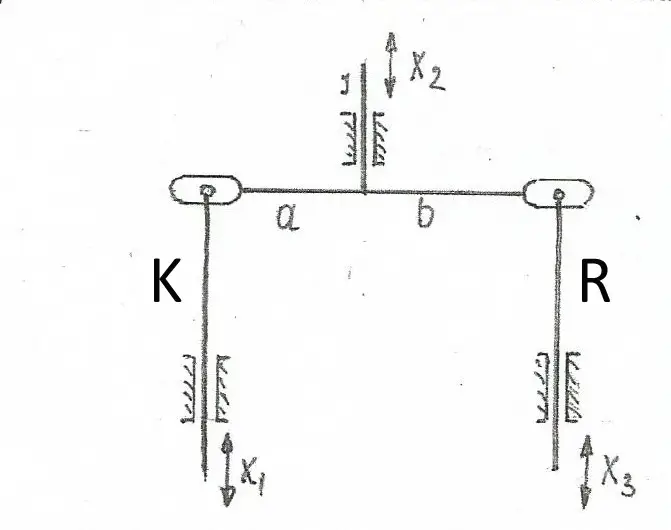
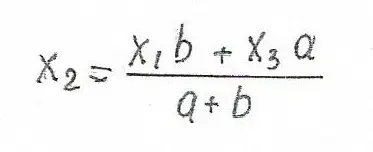
Przesunięcie X2 jarzma „J” jest zależne od długości elementów „a” i „b”, oraz przesunięć X1 i X3 elementów K i R w sposób następujący:
Tego typu rozwiązanie stosuje się choćby dla porównania sił, czy też dla uzależnienia możliwości wykonania jakiejś funkcji od wcześniejszego osiągnięcia właściwej pozycji przez elementy składowe.
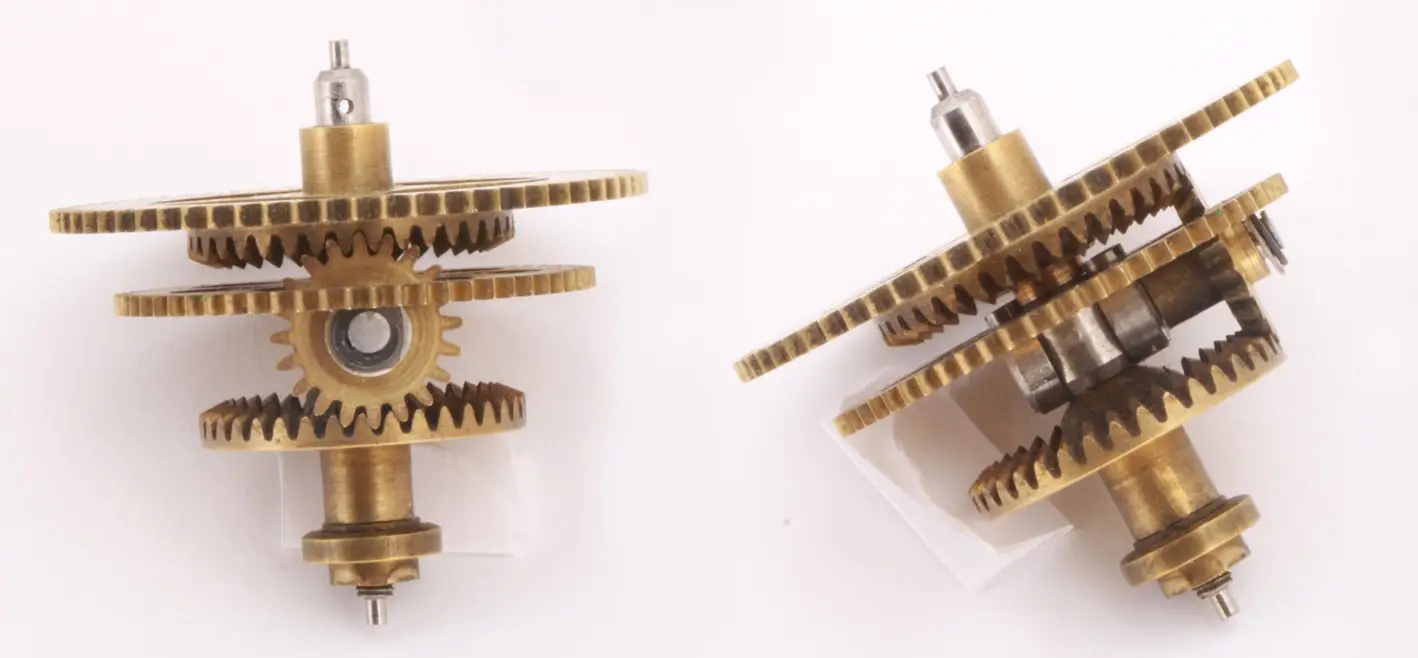
2.Mechanizm różnicowy (sumujący) z kołem stożkowym
Klasycznym mechanizmem różnicowym jest przekładnia zębata zbudowana z trzech kół zębatych stożkowych. Model takiej przekładni jest przedstawiony poniżej.
Jej schemat można przedstawić następująco:
Jest on często zwany także dyferencjałem.
Jego schemat przedstawiony jest poniżej:
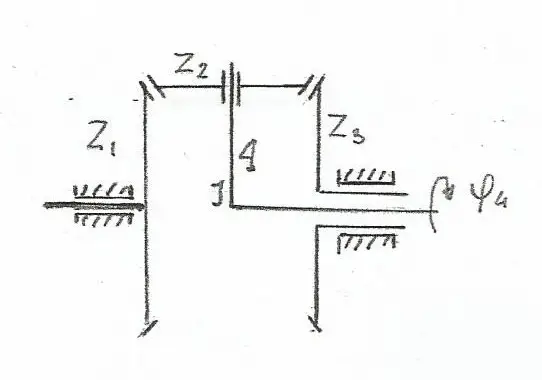
Kąt obrotu ɸ4 jarzma „J” zależy od konstrukcji zespołu – liczby zębów współpracujących kół: z1, z2, z3, oraz kątów obrotów ɸ1 i ɸ3.
Dla z1 = z2 zależność ta wynosi:
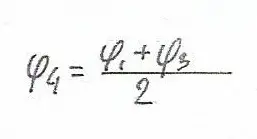
W użytkowych zastosowaniach najczęściej kierunek ruchu zewnętrznych kół jest przeciwny, a przy z1 = z2 i zatrzymanym jarzmie rozdział ruchu jest symetryczny.
Przekładnia ta jest stosowana często w wielu konstrukcjach i to właśnie ona była opisana jako modyfikacja przekładni chodu zegarka w celu uzyskania wskazania rezerwy naciągu na stronie TUTAJ
3. Mechanizm różnicowy (sumujący) z kołami płaskimi i zazębieniem zewnętrznym
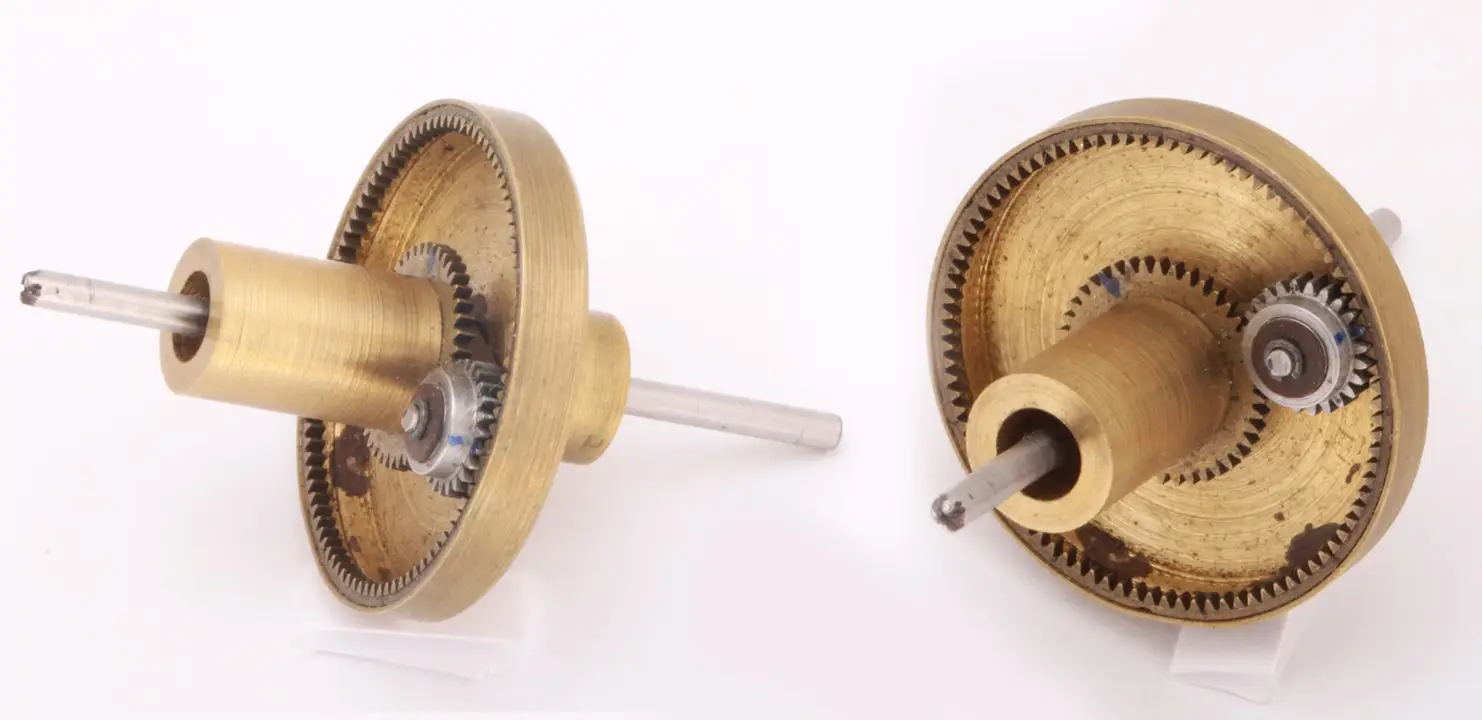
Inną przekładnia różnicową o analogicznych właściwościach jest mechanizm z zastosowaniem płaskich kół zębatych o zazębieniu zewnętrznym.
Model takiej przykładni został przedstawiony na poniższej ilustracji.
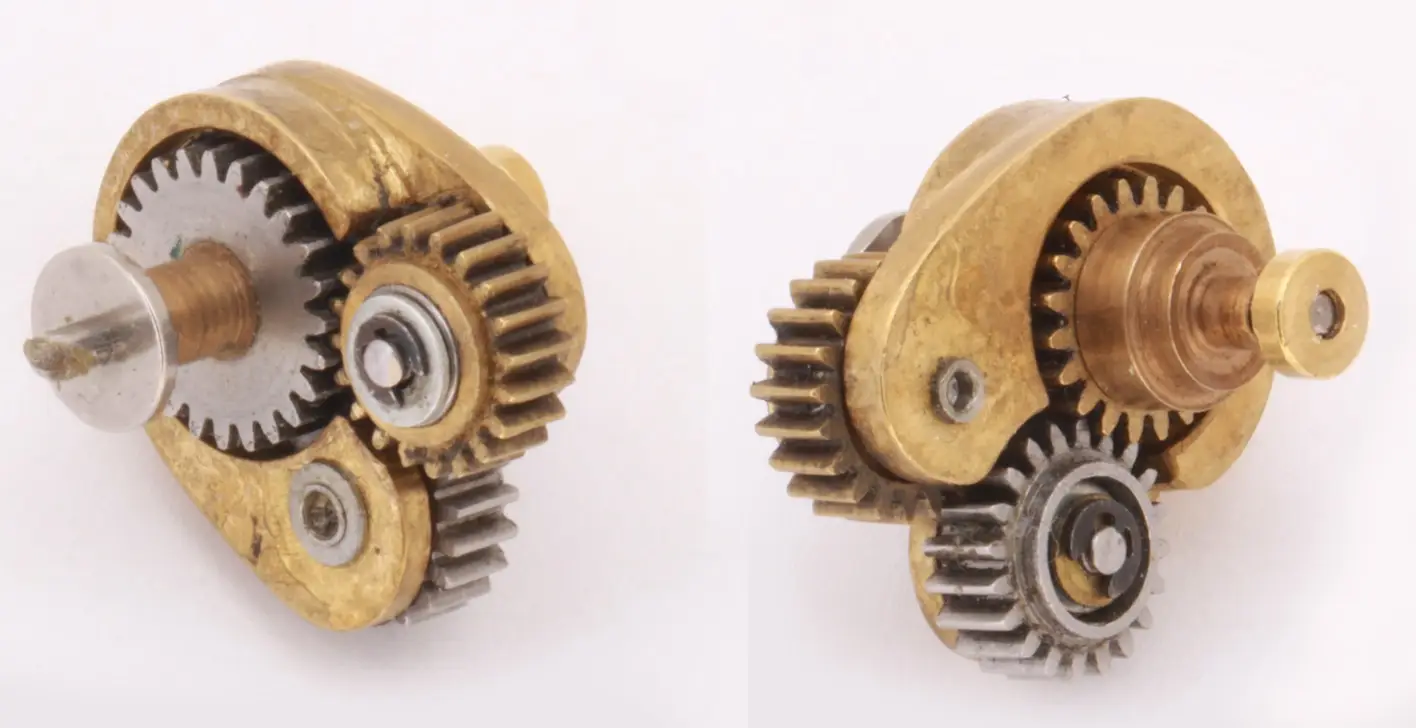
Schemat takiej przekładni można przedstawić następująco:
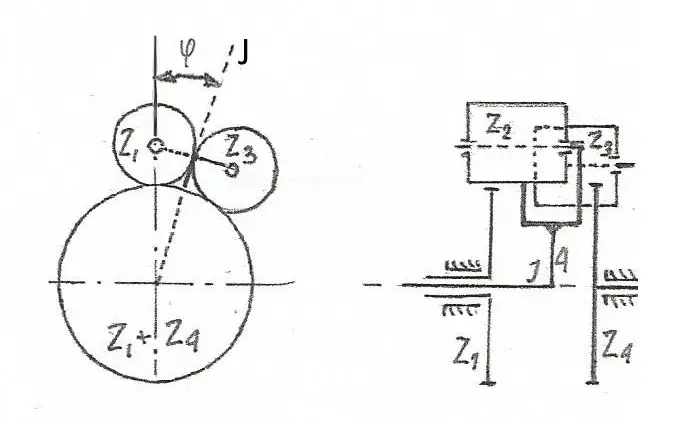
Warunkiem poprawnego działania mechanizmu jest następująca zależność dotycząca liczby zębów dla współpracujących kół zębatych:
Z1 = Z4 oraz Z2 = Z3
Koło Z1 współpracuje z kołem Z2, koło Z2 współpracuje z kołem Z3, a koło Z3 współpracuje z kołem Z4.
Przy przeciwnym ruchu kół Z1 i Z4 kąt obrotu ɸ jarzma „J” zależy od różnicy prędkości obrotowej kół Z1 i Z4
4. Mechanizm różnicowy (sumujący) z kołami płaskimi i zazębieniem zewnętrznym – wariant drugi
Jeszcze innym rodzajem przekładni różnicowej z kołami zębatymi płaskimi jest mechanizm, których schemat można przedstawić jak poniżej:
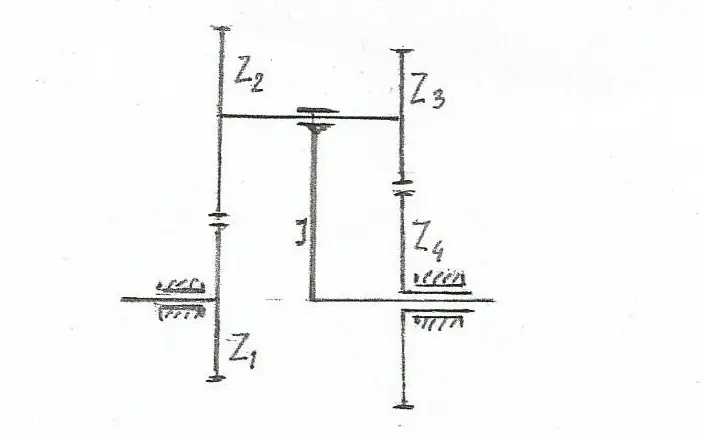
Koła zewnętrzne Z1 i Z4 zachowują ten sam kierunek obrotu przy zmiennym rozdzieleniu ruchu.
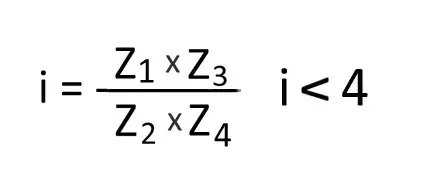
Jej przełożenie przy zatrzymanym jarzmie jest zwykle mniejsze niż 4.
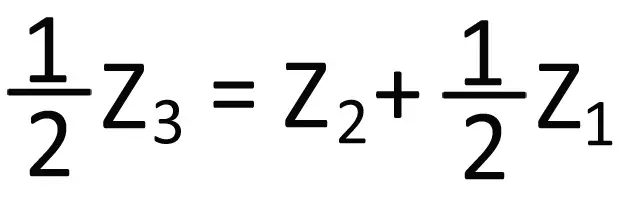
5. Mechanizm różnicowy (sumujący) z kołami płaskimi i zazębieniem wewnętrznym
Korzystając z kół o uzębieniu wewnętrznym można zbudować przekładnię której model jest pokazany poniżej:
Przy nieruchomym jarzmie "J" uzyskujemy przeciwbieżny ruch koła Z1 w stosunku do koła Z3.
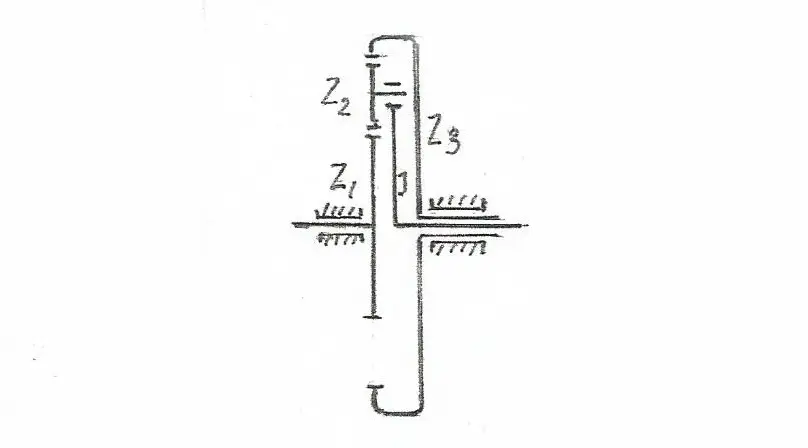
Przełożenie pomiędzy członami zależy od liczby zębów zastosowanych kół, ale by „zmieścić" koła z zazębieniem zewnętrznym mamy następujący warunek dla średnic dobieranych kół:
6. Mechanizm różnicowy (sumujący) z wałkiem gwintowanym i „pływającą nakrętką”
Ciekawym rozwiązaniem stosowanym w zegarmistrzostwie jest zupełnie inny mechanizm różnicowy oparty na wałku gwintowanym z „pływającą nakrętką”.
Jego schemat przedstawiony jest poniżej:
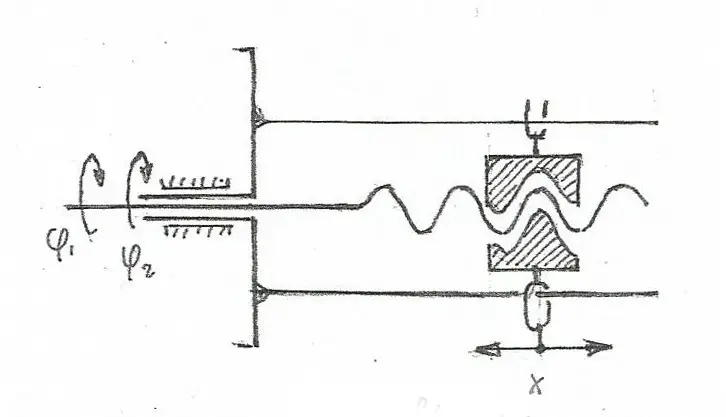
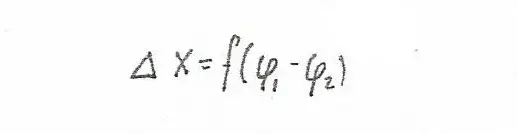
Położenie wzdłużne nakrętki jest zależne od różnicy liczby obrotów wałka względem obrotów widełek obracających nakrętkę zgodnie ze wzorem:
Podsumowanie
Zaprezentowane tu rozwiązania są tylko małą cząstką rodziny mechanizmów różnicowych stosowanych w technice. Co warto podkreślić, podobnie jak dla wielu rozwiązań zegarkowych, także mechanizm różnicowy w zegarmistrzostwie po raz pierwszy został zastosowany w dużych zegarach wieżowych.
O mechanizmie różnicowym zastosowanym w zespole napędu zegara, w wydanym w roku 1952 piątym tomie Zegarmistrzostwa, w części pod tytułem „Zegary wieżowe” brat Podwapiński napisał następujące słowa:
„Nowocześniejszy i praktyczniejszy jest różnicowy napęd po-średni. Przy tym napędzie spotykamy się z trudniejszym zagadnieniem mechaniki, tj. z przekładnią różnicową (Differential - werk). Przed kilkudziesięciu laty mechanizm taki był rzadko spotykany, obecnie jednak, wobec ogromnego rozwoju ruchu samochodowego, „dyferencjał" jest ogólnie znany.”
Wskazaniu zdecydowanie większej liczbie przykładowych zastosowań mechanizmów różnicowych w zegarmistrzostwie, poświęcona będzie drugie, oddzielne opracowanie dotyczące poruszanego tematu.
Karol Roman
ciąg dalszy nastąpi...
























 INSTAGRAMIE
INSTAGRAMIE









 greenlogic.eu
greenlogic.eu